官方微信
官方微信

 官方QQ
官方QQ

摘 要:针对汽车产业的未来发展需求和驾驶安全的目的,阐述了一种基于机器视觉的智能化自动驾驶原理,首先利用传感器的识别能力和感知能力,将信息进行提取并传输到处理单元,处理单元采用一定的算法进行识别和分析处理,而后进行反馈和控制,以实现车辆的自动驾驶,这为自动驾驶技术提供了新的解决思路。
关键词:机器视觉;自动驾驶;运动检测
近年来汽车保有量不断增长,各个国家投入了大量的人力、物力和财力开发智能交通运输系统, 自动驾驶技术作为其中非常重要的分支,也在逐渐发展[1]。自动驾驶技术的开发具有众多优点,不仅能够减缓道路运输系统的压力,还能够最大程度地减少各类交通事故的发生,减少驾驶员各类操作错误带来的弊端和不足。对此国内外研究者进行了大量的研究,也取得了阶段性的进步,但对控制策略方面的研究不够全面,需要更加深入[2]。
在控制策略研究中,引入了人工智能分支下的机器视觉技术,简单来说是用机器代替人眼进行测量和判断,丰富了现有的自动驾驶技术,根据车辆在道路中的位置定位、速度控制和加速信息等参数值来判断最终的驾驶策略,不再采用人工智能控制策略逻辑语句“IF…THEN…”,保障车辆在正常行驶过程中的安全性、有序性和高效率[3-4]。
1 、机器视觉的基本原理
视觉是生命体重要的信息来源,以人类视觉系统为例,包括信息源(光线)、角膜和瞳孔感光器官、神经中枢和感光细胞等分析器官,这些构成了人类的视觉系统。模仿人类视觉系统开发的机器视觉是近几十年科学家的研究成果,如今机器视觉已经发展成为包含硬件和软件的人工智能分支,其基本流程包括信息源(图形采集)、信息处理(图像处理)、信息综合分析(图形分析)。机器视觉作为自动驾驶汽车和自动驾驶技术的未来发展方向之一,会在很大程度上帮助驾驶员完成观察、监视和分析工作[5]。
1.1 信息源
信息源是图像采集单元,通过图像传感器将实时状态进行拍照投射到信息处理单元。图像采集需要相当规模的相机传感器,可以排列成阵列模式,投射到处理单元后还原为统一的图像,图像一般是根据预定的算法进行还原和重现,而且图像传感技术随着近些年工业化程度加大,技术难度大大降低,很多厂家能够生产低能耗、抗干扰的传感器阵列。
1.2 信息处理
信息处理在机器视觉领域主要是图像处理, 很大程度上取决于计算机的计算能力,包含海量数据的提取、转换和预处理操作,以及基本的图像识别、增强和对比等。信息处理作为中间过渡单元,起桥梁作用,连接前端的信息数据源和后端的信息分析环节。
1.3 信息综合分析
信息综合分析是图像的最终处理单元,也是当今机器视觉中最难的分支,为此开发了各种算法和分析框架,同时这也是一个跨学科的课题, 为人工智能可视化、智能化提供新的解决思路, 伴随着大数据和人工智能时代来临,会在很大程度上降低操作难度。
2、车辆闭环控制与检测
2.1 自动驾驶系统结构
自动驾驶系统以基本的车辆模型为标准进行组装,其基本运动方式为后轮驱动、前轮转向的标准驾驶结构,以平整路段为工作路段,以仰角小于 15为基本的仰角,驾驶规范为平稳过渡连接,基本的机器视觉系统布置如图 1 所示。采集单元的摄像头布置在车辆的前端和两侧,俯视角度约为 20,以间距为 25 cm 排列,惯性传感器采用微机电系统传感器,安装在车辆底盘附近,测量的数据更加贴近实际参数。处理单元是整个控制系统的中枢,包括CPU核心板、电源电压转换电路、各类传感器、信息处理单元和人机交互单元等,车辆的控制系统硬件结构如图2所示。
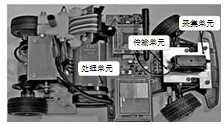
图1机器视觉系统布置
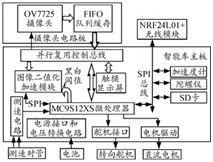
图2控制系统硬件结构示意图
2.2 控制策略研究
自动驾驶技术是根据实际的道路运行情况进行自我修正和控制的一种策略,其参照的基本参数包括车辆运行状态和历史轨迹、运行的实际速度和加速度、转角、期望值以及预期目标。
控制策略根据姿态和惯性导航传感器参数进行控制,这种微机电系统传感器具有一定的漂移和干扰,需要进行修正,更新原始数据。采用陀螺仪计算车辆的角速度,输入到闭环控制,对其进行物理量变换、坐标转换等操作,将参数修正为更加贴近实际的轨迹数据和车辆姿态;而后通过执行器进行修正,车辆的执行器主要是动力源发动机或者电机,例如电机控制可以采用PI(ProportionIntegration,比例-积分)控制,因为无法获得更加精确的反馈,所以会依赖摄像头传感器预估未来的大致转向和速度控制,此延迟模式采用PD(ProportionDifferentiation,比例-微分)控制策略。车辆在正常运行过程中摄像头获取信息,需要确定获取的目标信息,目标信息的范围以及为了获取目标信息所要采取的方式。在图像处理和识别中,对于图像的预处理一般采用Python语言进行分类,通过一些预处理手段如增强、复原和压缩等进行图像的分割和特征提取;而后为了实现期望的路径规划和策略制定,需要采用诸如蚁群算法等路径规划算法,不断进行计算和比较,以选择局部最优,进而达到整体最优,然后将决策结果传输给执
行器进行控制并反馈。
2.3 控制策略的优化
根据车辆实际运行轨迹对一些问题进行优化,以贴近实际。
(1)道路行驶的优化。
实际情况下道路有平直道路、S 形弯道、十字交叉路口等,需要更好控制实际的车辆变速和角度偏转,防止车辆行驶过程中左右摇摆和电机加速,特别需要注意十字交叉路口出现车辆循迹不足,找不到实际路段,可能导致重大交通事故。
(2)车辆仰角、俯角的识别和坡道加减速。
当车辆上坡时,车辆的传感器和摄像头因为车辆的仰角出现摄像头上扬,无法识别出道路的具体方位和状况;当车辆下坡时,出现摄像头下倾导致参数不准确,并且在一些颠簸路段,也会存在参数不准确问题。在用PID(Proportion、Integration、Differentiation,比例、积分、微分)控制角度时,因为反馈元件有延迟问题或者没有反馈器件,导致机器视觉对车辆的控制具有一定延迟,图像识别滞后。
基于摄像机成像原理给出纵向测距模型,如图 3 所示,YOZ 为标准坐标系,其中 Yc Oc Zc 为摄像机的坐标系,h 为相机到地面的垂直距离,为光轴与水平方向的角度,f 为相机的焦距,即线段OoOc 距离。通过相机标定的方法获得 h 和数据, 当相机型号和位置固定后,可利用确定的测距模型计算出图像中物体与相机的实际距离。
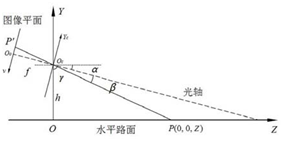
图 3 纵向测距模型
关键词:机器视觉;自动驾驶;运动检测
近年来汽车保有量不断增长,各个国家投入了大量的人力、物力和财力开发智能交通运输系统, 自动驾驶技术作为其中非常重要的分支,也在逐渐发展[1]。自动驾驶技术的开发具有众多优点,不仅能够减缓道路运输系统的压力,还能够最大程度地减少各类交通事故的发生,减少驾驶员各类操作错误带来的弊端和不足。对此国内外研究者进行了大量的研究,也取得了阶段性的进步,但对控制策略方面的研究不够全面,需要更加深入[2]。
在控制策略研究中,引入了人工智能分支下的机器视觉技术,简单来说是用机器代替人眼进行测量和判断,丰富了现有的自动驾驶技术,根据车辆在道路中的位置定位、速度控制和加速信息等参数值来判断最终的驾驶策略,不再采用人工智能控制策略逻辑语句“IF…THEN…”,保障车辆在正常行驶过程中的安全性、有序性和高效率[3-4]。
1 、机器视觉的基本原理
视觉是生命体重要的信息来源,以人类视觉系统为例,包括信息源(光线)、角膜和瞳孔感光器官、神经中枢和感光细胞等分析器官,这些构成了人类的视觉系统。模仿人类视觉系统开发的机器视觉是近几十年科学家的研究成果,如今机器视觉已经发展成为包含硬件和软件的人工智能分支,其基本流程包括信息源(图形采集)、信息处理(图像处理)、信息综合分析(图形分析)。机器视觉作为自动驾驶汽车和自动驾驶技术的未来发展方向之一,会在很大程度上帮助驾驶员完成观察、监视和分析工作[5]。
1.1 信息源
信息源是图像采集单元,通过图像传感器将实时状态进行拍照投射到信息处理单元。图像采集需要相当规模的相机传感器,可以排列成阵列模式,投射到处理单元后还原为统一的图像,图像一般是根据预定的算法进行还原和重现,而且图像传感技术随着近些年工业化程度加大,技术难度大大降低,很多厂家能够生产低能耗、抗干扰的传感器阵列。
1.2 信息处理
信息处理在机器视觉领域主要是图像处理, 很大程度上取决于计算机的计算能力,包含海量数据的提取、转换和预处理操作,以及基本的图像识别、增强和对比等。信息处理作为中间过渡单元,起桥梁作用,连接前端的信息数据源和后端的信息分析环节。
1.3 信息综合分析
信息综合分析是图像的最终处理单元,也是当今机器视觉中最难的分支,为此开发了各种算法和分析框架,同时这也是一个跨学科的课题, 为人工智能可视化、智能化提供新的解决思路, 伴随着大数据和人工智能时代来临,会在很大程度上降低操作难度。
2、车辆闭环控制与检测
2.1 自动驾驶系统结构
自动驾驶系统以基本的车辆模型为标准进行组装,其基本运动方式为后轮驱动、前轮转向的标准驾驶结构,以平整路段为工作路段,以仰角小于 15为基本的仰角,驾驶规范为平稳过渡连接,基本的机器视觉系统布置如图 1 所示。采集单元的摄像头布置在车辆的前端和两侧,俯视角度约为 20,以间距为 25 cm 排列,惯性传感器采用微机电系统传感器,安装在车辆底盘附近,测量的数据更加贴近实际参数。处理单元是整个控制系统的中枢,包括CPU核心板、电源电压转换电路、各类传感器、信息处理单元和人机交互单元等,车辆的控制系统硬件结构如图2所示。
图1机器视觉系统布置
图2控制系统硬件结构示意图
2.2 控制策略研究
自动驾驶技术是根据实际的道路运行情况进行自我修正和控制的一种策略,其参照的基本参数包括车辆运行状态和历史轨迹、运行的实际速度和加速度、转角、期望值以及预期目标。
控制策略根据姿态和惯性导航传感器参数进行控制,这种微机电系统传感器具有一定的漂移和干扰,需要进行修正,更新原始数据。采用陀螺仪计算车辆的角速度,输入到闭环控制,对其进行物理量变换、坐标转换等操作,将参数修正为更加贴近实际的轨迹数据和车辆姿态;而后通过执行器进行修正,车辆的执行器主要是动力源发动机或者电机,例如电机控制可以采用PI(ProportionIntegration,比例-积分)控制,因为无法获得更加精确的反馈,所以会依赖摄像头传感器预估未来的大致转向和速度控制,此延迟模式采用PD(ProportionDifferentiation,比例-微分)控制策略。车辆在正常运行过程中摄像头获取信息,需要确定获取的目标信息,目标信息的范围以及为了获取目标信息所要采取的方式。在图像处理和识别中,对于图像的预处理一般采用Python语言进行分类,通过一些预处理手段如增强、复原和压缩等进行图像的分割和特征提取;而后为了实现期望的路径规划和策略制定,需要采用诸如蚁群算法等路径规划算法,不断进行计算和比较,以选择局部最优,进而达到整体最优,然后将决策结果传输给执
行器进行控制并反馈。
2.3 控制策略的优化
根据车辆实际运行轨迹对一些问题进行优化,以贴近实际。
(1)道路行驶的优化。
实际情况下道路有平直道路、S 形弯道、十字交叉路口等,需要更好控制实际的车辆变速和角度偏转,防止车辆行驶过程中左右摇摆和电机加速,特别需要注意十字交叉路口出现车辆循迹不足,找不到实际路段,可能导致重大交通事故。
(2)车辆仰角、俯角的识别和坡道加减速。
当车辆上坡时,车辆的传感器和摄像头因为车辆的仰角出现摄像头上扬,无法识别出道路的具体方位和状况;当车辆下坡时,出现摄像头下倾导致参数不准确,并且在一些颠簸路段,也会存在参数不准确问题。在用PID(Proportion、Integration、Differentiation,比例、积分、微分)控制角度时,因为反馈元件有延迟问题或者没有反馈器件,导致机器视觉对车辆的控制具有一定延迟,图像识别滞后。
基于摄像机成像原理给出纵向测距模型,如图 3 所示,YOZ 为标准坐标系,其中 Yc Oc Zc 为摄像机的坐标系,h 为相机到地面的垂直距离,为光轴与水平方向的角度,f 为相机的焦距,即线段OoOc 距离。通过相机标定的方法获得 h 和数据, 当相机型号和位置固定后,可利用确定的测距模型计算出图像中物体与相机的实际距离。
图 3 纵向测距模型
路面水平方向一点 P(0,0,Z)位于Z 轴上,点P 在图像坐标系中的投影为P′,v 为行驶速度,为已知量。
页面垂直夹角γ可由α和连线光轴夹角β求得
γ=90o-α -β (1)
其中连线光轴夹角β可由速度v 和相机成像中心速度v0、焦距f 求得
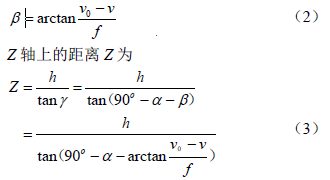
则点P′与成像中心点Oo 的距离dP′Oo 为dP′Oo=f⋅ tanβ (4)
则点P′与成像中心点Oo 的距离dP′Oo 为dP′Oo=f⋅ tanβ (4)
其中相机高度h 和仰角α可由实际测量得到,根据车辆本身的基本测距参数可以得到道路成像区域,并对区域进行区域分割,即对感兴趣的知识片段或者数据片段进一步处理,减少后续数据处理量。采用检测窗口进行遍历检测,基于搜索路线对每个节点进行访问,利用一致规则将中间状态连接起来构成路径,为车辆保存目标区域[6]。
3、结束语
广大的科研工作者和工程师对自动驾驶技术进行了大量的研究,利用机器视觉的高分辨和高智能性质可以解决自动驾驶问题,具有一定的实践意义。
参考文献
[1]王天河,侯建军. 基于机器视觉和姿态检测的循迹智能车[J].兵工自动化,2012,31(8):82-85.
[2]徐永,赵海良,郑怡. 基于机器视觉的车辆自动驾驶模糊控制设计[J]. 北华大学学报(自然科学版),2008(1):89-92.
[3]贾森君,王琴. 基于机器视觉联合模糊控制的船舶桥区避障研究[J]. 机械工程师,2018(8):92-94,97.
[4]笪陈宇,唐明,雷鑑铭. 基于自动驾驶的机器视觉原理及应用[J]. 无线互联科技,2018,15(10):124-125.
[5]姜灏. 一种自动驾驶车的环境感知系统[J]. 电子制作,2018(15):70-73.
[6]谭力凡. 机器视觉与毫米波雷达融合的前方车辆检测方法研究[D].长沙:湖南大学,2018.
相关热词搜索: