官方微信
官方微信

 官方QQ
官方QQ

摘要:随着工业自动化技术的快速发展,将机器视觉应用于工业分拣系统有利于提高分拣系统的工作效率和智能化程度。本文针对机器视觉技术在工业分拣中的关键技术进行研究,采用基于模板匹配的图案定位方法实现工件的识别定位,利用工具坐标系的建立与示教完成机械手-相机标定。实验结果表明,分拣系统能够快速、准确的完成分拣任务,具有较高的应用价值。
关键词:机器视觉;工业机器人;分拣;关键技术
0.引言
随着工业机器人技术在工业自动化生产中的大量普及和应用,分拣技术逐渐摆脱了传统的人工分拣过程,向着智能化分拣方向发展。与传统的机械分拣作业相比,将机器视觉技术应用到工业分拣系统上有着高质量、高速率、高智能等无法替代的优势。
虽然当前机器视觉技术已经开始应用于工业分拣系统中,但针对不同的分拣目标和任务,仍然存在着许多问题。因此,针对视觉分系统关键技术的研究分析具有重要的实际意义。本文针对工业机器人视觉分拣系统的关键技术进行研究,并能够快速、准确的完成分拣任务。
关键词:机器视觉;工业机器人;分拣;关键技术
0.引言
随着工业机器人技术在工业自动化生产中的大量普及和应用,分拣技术逐渐摆脱了传统的人工分拣过程,向着智能化分拣方向发展。与传统的机械分拣作业相比,将机器视觉技术应用到工业分拣系统上有着高质量、高速率、高智能等无法替代的优势。
虽然当前机器视觉技术已经开始应用于工业分拣系统中,但针对不同的分拣目标和任务,仍然存在着许多问题。因此,针对视觉分系统关键技术的研究分析具有重要的实际意义。本文针对工业机器人视觉分拣系统的关键技术进行研究,并能够快速、准确的完成分拣任务。
1、视觉分拣系统总体设计
1.1 硬件结构
视觉分拣系统主要由工业机器人、视觉系统和传送平台组成,其中工业机器人主要负责工件的抓取和放置;视觉系统组主要负责目标的识别和定位;传送平台主要负责目标的搬运和放置。
(1)工业机器人。工业机器人主要包括示教器、机器人控制器和机器人机械结构等部分。示教盒主要负责机器人运动坐标的初定和机器人程序的编写,机器人控制器主要负责机器人算法程序的执行,系统选择苏州汇博HR20-1700-C10型六轴工业机器人。(2)视觉系统。视觉系统主要由工业相机和光源组成,工业相机选择无锡信捷SV4-30ML型号智能相机,其内嵌数字图像处理(DSP)芯片,电源控制器选择型号为SIC-242,光源选择白色背光源。(3)传送平台。传送平台即流水线,选用SIMATICS7-1200系列PLC作为控制器,通过SIMATICG120变频器对传送带三相电机进行控制。
1.2 总体工作流程
根据分拣任务需求,首先PLC控制传送带将工件运送到工作区进行图像采集,然后相机对采集图像进行处理分析,实现工件的识别定位,最后根据建立的目标图像坐标系和机器人坐标系之间的关系,引导机器人抓取不同种类的工件。
2、视觉系统关键技术
视觉分拣系统关键技术主要包括工件识别与定位和机械手-摄像机标定环节,通过图像处理技术获取工件类型和位置角度信息,通过机械手-摄像机标定完成工件位置的准确抓取。
2.1 工件识别与定位
如图1所示,工件包含四种类型,针对四种类型工件的识别,采用无锡信捷X-SIGHTSTUDIO软件完成算法的开发,具体步骤如下:
(1)离线模板建立与参数配置。利用“图案定位工具”对每种类型工件建立离线模板,模板区域在保证图像边缘特征的情况下尽可能缩小模板尺寸大小,以提高图相匹配速度。配置图案定位工具参数,其中“相似度阈值=90”,考虑到工件的对称性“,目标搜索角度”范围设置为-90—90“,目标搜索个数”为1。(2)脚本程序编写。首先将脚本变量初始化清零,然后调用图案定位工具结果将工件识别的位置和角度提取到脚本中的变量中。(3)Modbus通讯参数配置。将脚本中的变量连接到相应的Modbus地址中,实现工业相机与PLC和工业机器人的数据通讯。
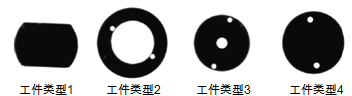
图1工件类型图
2.2 机械手-摄像机标定
机器人通过视觉感知获取目标物的三维空间坐标,因此需要建立二维像素点与三维物点之间的映射关系,即机械手-摄像机标定,也称为“手眼标定”。机械手-摄像机标定过程就是确定像素坐标系与三维空间点之间的几何映射参数,标定过程如下:
(1)工具坐标系建立。工具坐标系即机器人末端工具坐标系,本系统末端工具包括三爪和双吸盘两种类型,呈垂直状态固定在机器人法兰盘上。定义法兰盘垂直方向为Z轴,利用“三点法”分别建立双吸盘和三爪工具坐标系。工具坐标系建立完成后,调用工具坐标系可以控制工具坐标末端按照三维方向运动。(2)工具坐标系与相机坐标系标定。为建立工具坐标系与相机坐标系的位置关系,以双吸盘为例,首先调用双吸盘工具坐标系控制双吸盘末端中心与托盘流水线的工件托盘中心位置对齐,并将角度调整为工件模版方向角,将此次位置的(x,y)与角度示教为工具坐标原点位置。为了便于实现中心位置的对齐,这里采用末端位置固定激光笔的方式完成。
为了提高分拣系统的抓放精度,需要保证流水线、工业机器人和工业相机位置的相对平行性,设原点为托盘中心位置(Xo,Yo),工件在机器人坐标系中的位置为(Xr,Yr),工件在相机坐标系中的位置为(xc,yc),根据工业机器人与相机的位置关系,可以得到工件在机器人和相机中的坐标系关系:
Xr=Xo-xc*h (1)
Yr=Yo-yc*h (2)
其中h为像素比,即物理尺寸与像素尺寸之比。
3、系统调试分析
视觉分拣系统主要由工业机器人、视觉系统和传送平台组成,其中工业机器人主要负责工件的抓取和放置;视觉系统组主要负责目标的识别和定位;传送平台主要负责目标的搬运和放置。
(1)工业机器人。工业机器人主要包括示教器、机器人控制器和机器人机械结构等部分。示教盒主要负责机器人运动坐标的初定和机器人程序的编写,机器人控制器主要负责机器人算法程序的执行,系统选择苏州汇博HR20-1700-C10型六轴工业机器人。(2)视觉系统。视觉系统主要由工业相机和光源组成,工业相机选择无锡信捷SV4-30ML型号智能相机,其内嵌数字图像处理(DSP)芯片,电源控制器选择型号为SIC-242,光源选择白色背光源。(3)传送平台。传送平台即流水线,选用SIMATICS7-1200系列PLC作为控制器,通过SIMATICG120变频器对传送带三相电机进行控制。
1.2 总体工作流程
根据分拣任务需求,首先PLC控制传送带将工件运送到工作区进行图像采集,然后相机对采集图像进行处理分析,实现工件的识别定位,最后根据建立的目标图像坐标系和机器人坐标系之间的关系,引导机器人抓取不同种类的工件。
2、视觉系统关键技术
视觉分拣系统关键技术主要包括工件识别与定位和机械手-摄像机标定环节,通过图像处理技术获取工件类型和位置角度信息,通过机械手-摄像机标定完成工件位置的准确抓取。
2.1 工件识别与定位
如图1所示,工件包含四种类型,针对四种类型工件的识别,采用无锡信捷X-SIGHTSTUDIO软件完成算法的开发,具体步骤如下:
(1)离线模板建立与参数配置。利用“图案定位工具”对每种类型工件建立离线模板,模板区域在保证图像边缘特征的情况下尽可能缩小模板尺寸大小,以提高图相匹配速度。配置图案定位工具参数,其中“相似度阈值=90”,考虑到工件的对称性“,目标搜索角度”范围设置为-90—90“,目标搜索个数”为1。(2)脚本程序编写。首先将脚本变量初始化清零,然后调用图案定位工具结果将工件识别的位置和角度提取到脚本中的变量中。(3)Modbus通讯参数配置。将脚本中的变量连接到相应的Modbus地址中,实现工业相机与PLC和工业机器人的数据通讯。
图1工件类型图
2.2 机械手-摄像机标定
机器人通过视觉感知获取目标物的三维空间坐标,因此需要建立二维像素点与三维物点之间的映射关系,即机械手-摄像机标定,也称为“手眼标定”。机械手-摄像机标定过程就是确定像素坐标系与三维空间点之间的几何映射参数,标定过程如下:
(1)工具坐标系建立。工具坐标系即机器人末端工具坐标系,本系统末端工具包括三爪和双吸盘两种类型,呈垂直状态固定在机器人法兰盘上。定义法兰盘垂直方向为Z轴,利用“三点法”分别建立双吸盘和三爪工具坐标系。工具坐标系建立完成后,调用工具坐标系可以控制工具坐标末端按照三维方向运动。(2)工具坐标系与相机坐标系标定。为建立工具坐标系与相机坐标系的位置关系,以双吸盘为例,首先调用双吸盘工具坐标系控制双吸盘末端中心与托盘流水线的工件托盘中心位置对齐,并将角度调整为工件模版方向角,将此次位置的(x,y)与角度示教为工具坐标原点位置。为了便于实现中心位置的对齐,这里采用末端位置固定激光笔的方式完成。
为了提高分拣系统的抓放精度,需要保证流水线、工业机器人和工业相机位置的相对平行性,设原点为托盘中心位置(Xo,Yo),工件在机器人坐标系中的位置为(Xr,Yr),工件在相机坐标系中的位置为(xc,yc),根据工业机器人与相机的位置关系,可以得到工件在机器人和相机中的坐标系关系:
Xr=Xo-xc*h (1)
Yr=Yo-yc*h (2)
其中h为像素比,即物理尺寸与像素尺寸之比。
3、系统调试分析
本文通过对机器视觉在工业分拣中的关键技术研究,搭建了视觉分拣系统,如图2所示,托盘流水线将工件运送到拍照工位,拍照工位传感器检测托盘到位后升起气缸,并触发相机拍照。相机拍照完成后控制气缸降落并对采集图像进行处理,图像处理节后相机将工件类型和像素位置信息发送到PLC。PLC对工件信息处理后将控制命令参数信息发送到工业机器人,最后工业机器人根据接收的工件类型与位置信息完成分拣过程。

图2系统调试图
4、结语
本文针对机器视觉在工件分拣中的关键问题进行研究,搭建了视觉分拣系统,完成了视觉分拣任务。工件识别定位方面,采用了基于模板匹配的图案定位方法。机械手-相机标定方面,采用了工具坐标系的建立与示教完成了相关标定。实验结果表明,分拣系统能够快速准确的完成工件的识别分拣任务,可以满足工业现场分拣需求。
参考文献
1、基于模板匹配的视觉分拣方法及应用研究[D].哈尔滨工业大学,2017.
2、刘振宇,赵彬,邹风山.机器视觉技术在工件分拣中的应用[J].计算机应用与软件,2012,29(11):87-91.
3、王诗宇,林浒,孙一兰,等.基于机器视觉的机器人分拣系统的设计与实现[J].组合机床与自动化加工技术,2017(03):125-129+133.
图2系统调试图
4、结语
本文针对机器视觉在工件分拣中的关键问题进行研究,搭建了视觉分拣系统,完成了视觉分拣任务。工件识别定位方面,采用了基于模板匹配的图案定位方法。机械手-相机标定方面,采用了工具坐标系的建立与示教完成了相关标定。实验结果表明,分拣系统能够快速准确的完成工件的识别分拣任务,可以满足工业现场分拣需求。
参考文献
1、基于模板匹配的视觉分拣方法及应用研究[D].哈尔滨工业大学,2017.
2、刘振宇,赵彬,邹风山.机器视觉技术在工件分拣中的应用[J].计算机应用与软件,2012,29(11):87-91.
3、王诗宇,林浒,孙一兰,等.基于机器视觉的机器人分拣系统的设计与实现[J].组合机床与自动化加工技术,2017(03):125-129+133.
相关热词搜索: