官方微信
官方微信

 官方QQ
官方QQ

在进行草坪修整的过程中,使用视觉算法角度能够使得自动化修整范围更加准确,促进修整机修整幅度的精确调整,提高草坪修整质量与效率。此外,采用视觉算法进行草坪障碍物以及修整度的测评,全程使用机械装置,因此发表论文得出的修正准度与自动化程度较高,在使用过程中能够实现较少人力成本的投入,修整速率较快。再者,在进行视觉算法的检测中,由于内设相机自身具有失真性,因此必须对内设相机进行标定,使得相机所观测到的空间信息精确度上升,促进草坪修整机的自动化运行。
一、发表论文视觉检测
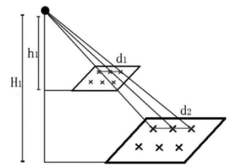
针对发表论文在草坪修整过程中出现的障碍物进行检测,使用插值测量的方式,其测量示意图如图1所示。首先将草坪修整机的内设相机按照不同的高度进行排列,随后经过插值计算,在视觉检测系统中对障碍物坐标精确定位。
二、发表论文实验分析
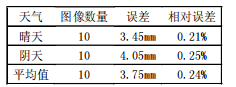
在发表论文上述对视觉检测的方式以及原理进行分析后,采用编程手段对草坪修整机的运行状况进行视觉算法模型,为了确保该实验结果的准确性,对公园绿化草坪进行多次取样,阴天10次,晴天10次,共计20次。通过数据分析得出表1。在表1中,可以明显发现,该草坪修整机的运行状况良好,自动化检测系统与实际距离之间的差异维持在3.75mm,平均误差为0.23%,因此得出基于视觉算法角度的草坪修整机运行是有效的、合理的,能够满足日常自动化草坪修整工程。
三、发表论文结束语
本文发表论文结合国内外草坪修整机的发展现状进行研究,发现现有草坪修整技术不能满足日益发展的绿化需求,杂草收集难度大、修整作业强度高以及技术的落后,严重制约了我国开展绿色中国的建设步伐,对草坪修整机的改进与完善成为时代发展的需求。针对上述情况的出现,通过对机械视觉的障碍技术进行深入研究,结合KAZZ536HH草坪修整机进行内部系统的优化改造,基于视觉算法角度为基础,提出一种运行效率更高、自动化控制以及视觉检测的新型草坪修整机,为后续草坪修整机的发展提供借鉴经验,但现有技术知识有限,因此不能对其进行深入理解,在分析环节中还需完善。本文主要对其运动行为进行了分析。(1)草坪修整机采用视觉算法进行草坪环境数据的采集,通过对其运动行为进行分析,包括建立运动学模型和动力学模型,为草坪修整机的智能化设计奠定了基础。(2)为验证该草坪修整机的性能,对其实际草坪的修整试验,结果表明:草坪修整机的性能稳定,可以完成草坪的修整工作。