官方微信
官方微信

 官方QQ
官方QQ

一、论文发表引言
在草坪的维护工作中,修整工作最为繁重,需要耗费大量的人力和物力进行维护,且工作效率低下。为了降低劳动强度、提高草坪修整速率,可以采用论文发表智能草坪修整机代替人工进行作业。智能草坪修整机是一种综合性较强的机器人设备,集合了传感控制技术、自动化技术及计算机通信等技术,具有降低人力消耗、工作效率高和安全系数高等优点。随着计算机和信息技术的飞速发展,通过计算机模拟视觉的方式可以进行信息的采集和处理工作,即视觉算法技术。视觉算法的定义是以计算机视觉技术为基础,将三维环境图像转化为二维图像,以便于获得图像的相关信息,包括位置、尺寸和形态等信息。该技术已经广泛地应用于医疗、航空等领域,具有成本低、精度高、自动化程度高等优点。目前,我国对于智能草坪修整机的主要研究工作为自主作业方面,如自动割草、自动充电和定时启动等功能,很少有文献将视觉算法应用于草坪修整机的智能化研究,其智能化程度还有很大的提升空间。智能草坪修整机能够准确快速完成草坪修整工作,除了控制系统的调控,还需要末端机构能实现完整空间形状的动作,即需要对其运动行为进行分析。因此,作者将基于视觉算法对草坪修整机进行设计,并进行运动分析。

二、草坪修整机研究论文发表现状
伴随着我国城镇化建设与美丽乡村战略的进一步深化,绿化植被覆盖率已经成为衡量环境标准的重要论文发表指标,其中草坪作为城镇建设中最为常见的绿化设施,其美观性是提升居民生活质量与环境标准的重要条件,因此我国迅速开展对绿化草坪的建设工作,但是现有草坪修整技术不能满足日益发展的绿化需求,杂草收集难度大、修整作业强度高以及技术的落后,严重制约了我国开展绿色中国的建设步伐,对草坪修整机的改进与完善成为时代发展的需求。在19世纪初期,英国学者就发明了第一台人工草坪修整机械,在经过一个世纪的不断完善与发展,在20世纪初期首次将内燃装置作为主要动力,并在后续英国工业公司的支持下发明了拖拉机草坪修整机。
信息化时代的来临为草坪修整机提供了新的发展契机,以智能化装置为核心的草坪修整机层出不穷,在我国进行绿化草坪修整的修整机一般以手推式为主,该种草坪修整机的重量较轻,体积较小,使用简便,但是单一的草坪修整方式导致效率低下,修整质量尚存疑问,并且在后续杂草的处理中较为复杂,在进行大规模草坪修整作业时,通常使用以燃油为能源动力的草坪修整机,该种修整机最大的优点就是能够持续运行,运行效率较高,但是会在运行过程中产生大量噪音,只能在远离城镇的郊区进行草坪修整。
三、基于论文发表机械视觉的障碍技术研究现状
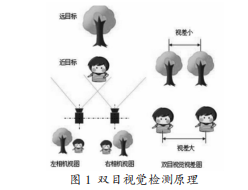
机械视觉是在上世纪中期被论文发表研究者提出,使用视觉能够将所观测到的视觉信息在内部层层筛选,同时将运行的标准进行精确的制定。伴随着科学技术的不断发展,机械视觉技术理论得到了有效补充,并且相关基础设施的价格也在逐渐走低,在各行各业中所占据的比例越来越重。进行机械视觉的障碍技术研究可分为两部分,一是对单目视觉进行障碍技术研究,该种技术研究方式对装置设备的配件要求较低,整体构造较为简便,在运行过程中,首选采用机械设备对视觉算法的输入,根据所进行视觉观察的目标变化,通过小孔成像的原理对目标距离进行精确运算,以便后续目的的达成。例如,我国著名视觉算法研究学家李庆通过将视觉算法所运行的空间替换成HSI空间,使用canny视觉算法,实现对视觉过程中障碍物的端口的监测,以此来确定与实际障碍物的距离;二是对双目视觉进行障碍技术研究,双目顾名思义,就是其运行原理与人类双眼相同,双目对所观测到的障碍物体积、距离等信息数据进行收集,由于双目所处位置不同,因此观测出的障碍物体积、距离存在差异,这种现象也可以理解为视差。如图1所示,当障碍物所处距离越远,视差越小;当障碍物所处距离越近,视差越大。